西安简业电子科技有限责任公司
在水泥厂及其他一些制造业厂矿,目前产品的出厂装车要么是全人工装车,要么就是半自动化装车,需要人工的实时干预,如果实现全自动装车,将大大减少人力。 在全自动装车系统中,要准确定位车厢在装车区域中的具体位置,以及车厢的大小等,具体需要提供的数据如下:
1. 车厢前后围栏的相对位置。
2. 车厢左右围栏的相对位置。
3. 车厢左右围栏的高度。
4. 车厢前后围栏的高度。
5. 车厢底部的相对高度。
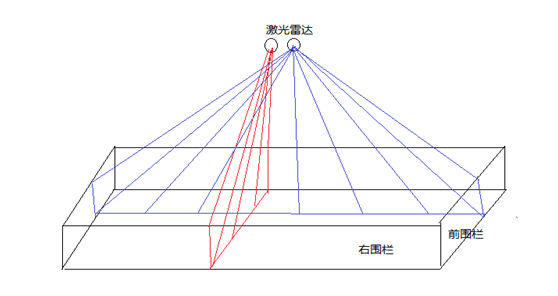
1.设计方案: 为了准确定位车厢在装车区域中的具体位置,我们计划使用激光雷达来进行非接触测量,测量使用两个激光雷达,其中一个激光雷达的扫描截面和车辆行驶方向平行,用来测量车厢前后围栏的相对位置及围栏高度,以及前后围栏间底板的相对最高点和最低点;另一个雷达的扫描截面和车辆行驶方向垂直,用来测量车厢左右围栏的相对位置,以及围栏的高度。
2.测量技术原理: 激光雷达测量技术,运用成熟的激光-时间飞行原理,非接触检测,对车辆进行高速扫描,再经过数据模型的运算,最终得出车辆扫描点的相对位置和相关数据。
3.测量系统的组成: 测量系统由两个激光雷达和一个控制仪组成,激光雷达负责扫描车厢,并将扫描数据通过网络传输给控制仪,控制仪接收到扫描数据后,根据数据模型算出相对位置和相关数据,并将测量结果数据通过232/485/网络接口发送给装车系统的PLC/工控机。
方案实施:
1.激光雷达的安装位置:
激光雷达安装于装车设备的下方平板处,两个雷达的扫描镜头位置垂直,一个扫描前后,一个扫描左右。(具体位置根据现场情况而定)
2.测量系统和装车系统的通讯和接口
2.1 通过232/485/网络接口来通讯。
2.2 当车辆行驶到激光雷达的正下方时(雷达位置在车厢四个围栏的区域中),雷达自动扫描,控制仪实时计算出围栏的相对位置和围栏高度。
2.3 PLC/工控机根据通讯协议向控制仪发送命令,请求数据,控制仪接到命令后向PLC/工控机发送测量数据。
诚邀合作企业共同发展:
1. 工程投标合作:本公司愿为合作企业工程投标提供产品授权,并提供一流服务 ,共同打造优质工程.
2. 对于自动装车车辆定位系统,本公司提供ODM服务,即产品贴牌,愿我们能共同发展。
3. 对于自动装车车辆定位系统,本公司提供一般性技术转让,愿我们能共同提高和完善产品的性能。
咨询电话:15129048782或者15935901107(微信同号)
自动装车车辆定位系统案例场景图
版权所有:西安简业电子科技有限责任公司 公司地址:西安市高新区高新二路9号创业咖啡街区天使楼9楼 联系人:茹先生 联系电话:15129048782 工信部备案:陕ICP备16015155号-1 公安部备案:61019002001332